


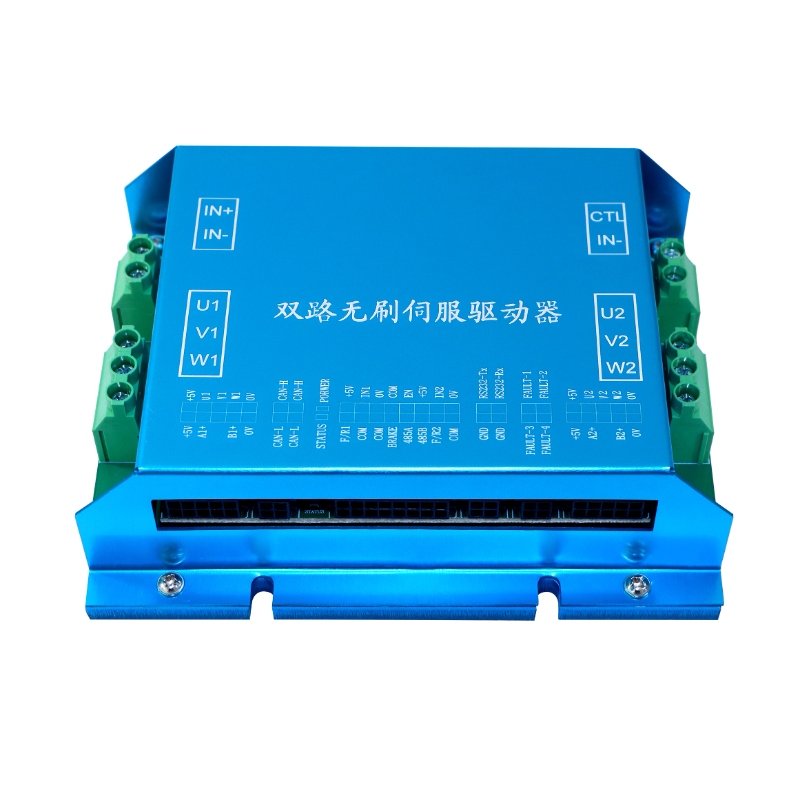
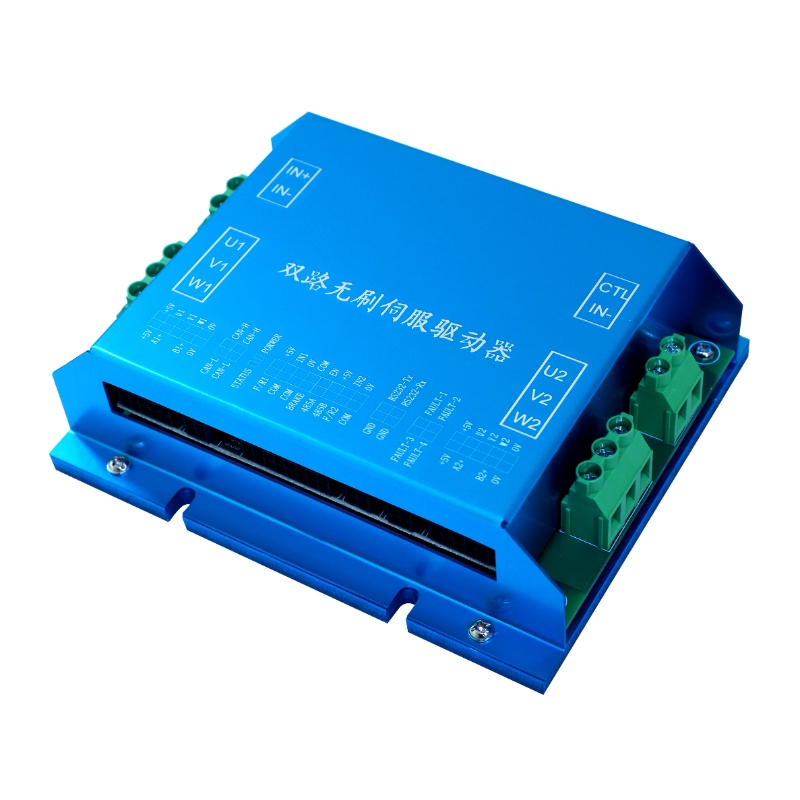
Contrôleur de moteur sans balais intelligent
Tension de fonctionnement : CC 24 V/48 V
Tension d'alimentation ultime : DC 16-55 V
Puissance du moteur adaptable : 600 W-1 000 W
Courant nominal : 30 A
Temps de surintensité : 500 ms
Rétroaction du signal : codeur incrémental, rétroaction Hall
Double canal contrôlable indépendamment.
Algorithme de contrôle de mouvement PID intelligent.
Mode indépendant à double moteur et mode mixte.
Description du produit :
KYDBL4860-2E est unContrôleur de moteur sans balais intelligent. Le pilote de moteur double sans balais peut contrôler deux moteurs CC sans balais en même temps. Il adopte un microcontrôleur hautes performances 32 bits et un algorithme de traitement de mouvement avancé pour réaliser une fonction différentielle électrique interne. Le contrôleur utilise le signal Hall à l'intérieur du moteur comme retour de position du rotor et fonctionne avec le signal du codeur incrémental externe (1000-2500 lignes) pour contrôler le mouvement du moteur, réalisant les modes de boucle ouverte de vitesse, de boucle fermée, de position et de couple. Il dispose d'une puce de pilote indépendante bidirectionnelle, d'une puce de traitement de codeur bidirectionnelle et d'une puce de traitement de signal Hall bidirectionnelle. Parallèlement, il dispose de multiples fonctions d'alarme de panne.Il dispose de deux modes de fonctionnement : le mode indépendant et le mode mixte.
jemode indépendant :Il peut réaliser un contrôle entièrement indépendant du moteur bidirectionnel, et la partie du signal de commande est contrôlée par des signaux d'entrée bidirectionnels. Le moteur à courant continu sans balais bidirectionnel peut contrôler la vitesse et la direction du moteur, séparément.
M.mode fixe :Il peut réaliser le contrôle synchrone (rotation avant, arrière, gauche et droite) de deux moteurs sans balais.
Le signal de commande dispose de 8 modes (télécommande sans fil, bascule, potentiomètre, quantité analogique, fréquence, largeur d'impulsion, RS232, bus CAN). 
Paramètres du produit :
Modèle |
KYDBL4860-2E |
Paramètres |
|
Tension de fonctionnement |
CC 24 V/48 V |
Tension d'alimentation ultime |
CC 16-55 V |
Puissance du moteur adaptable |
600W-1000W |
Courant nominal |
30A |
Courant max. instantané |
60A |
Temps de surintensité |
500 ms |
Retour de signal |
Codeur incrémental, rétroaction Hall |
Mode de travail |
Mode vitesse, mode couple, mode position |
Méthode de refroidissement |
Refroidissement naturel |
Méthode de contrôle |
RS232; CAN2.0; RC; 0-5 V; PWM |
Température de fonctionnement. |
-25℃-+60℃ |
Température de stockage. |
-35℃-+65℃ |
Propriétés isolantes |
La sortie et l'entrée sont isolées à DC600V du châssis, le courant de fuite est de 0,07 mA, la résistance d'isolement est supérieure à 20 MΩ. |
Propriétés protectrices |
Résistant à la poussière, à l'humidité et aux embruns salins |
Fonction de protection |
Délai de surintensité/Surtension/Sous-tension/Surchauffe/Court-circuit |
Plage de vitesse contrôlable |
0-6000 tr/min |
Niveau de protection |
IP20 |
Dimension |
190*130*45mm |
Poids |
1,64 kg |
Norme de faisceau de câblage |
1M |
Caractéristiques du produit :
Entrée de tension à large plage, 16-55 V, tension limite maximale 60 V.
Boucle de régulation PID intelligente.
Mode de fonctionnement : contrôle de vitesse en boucle ouverte, contrôle en boucle fermée, contrôle de couple en boucle fermée, contrôle de position en boucle fermée.
Potentiomètre externe, mode de contrôle de quantité analogique 0-5 V ou de commande d'impulsion, mode de contrôle RC (signal de largeur d'impulsion émis par le récepteur de la télécommande d'aéromodélisme).
Contrôle de sécurité avant et arrière, fonctionnement à quatre quadrants, régénération de support.
Activer la fonction de contrôle.
Contrôle du courant maximal.
Port d'entrée à 4 voies ; la fonction peut être définie comme une fonction d'entrée analogique, d'entrée d'impulsion ou d'entrée numérique.
Sortie numérique à 6 voies (tube MOS à drain ouvert), qui peut servir de sortie d'état d'alarme de panne du contrôleur et peut contrôler le relais externe pour réaliser des actions telles que la déconnexion automatique de l'alimentation.
Des anomalies telles que la surintensité, la surchauffe, la surtension et le court-circuit déclencheront la fonction de protection.
Indicateur d'état LED.
Communication par bus CAN, voir le protocole de communication détaillé lors de son utilisation.
Communication RS232, voir le protocole de communication détaillé lors de son utilisation.
Communication USB, voir le protocole de communication détaillé lors de son utilisation.

Équipement et atelier avancés :

Certificat:

FAQ :


