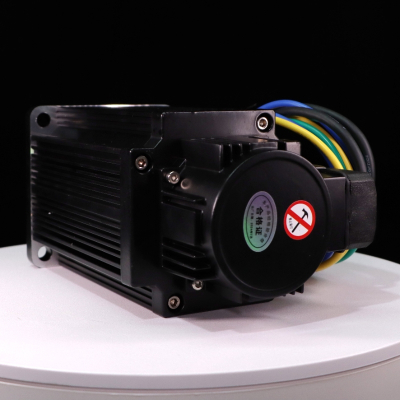

Moteur d’articulation de robot
Tension nominale : DC48-96V
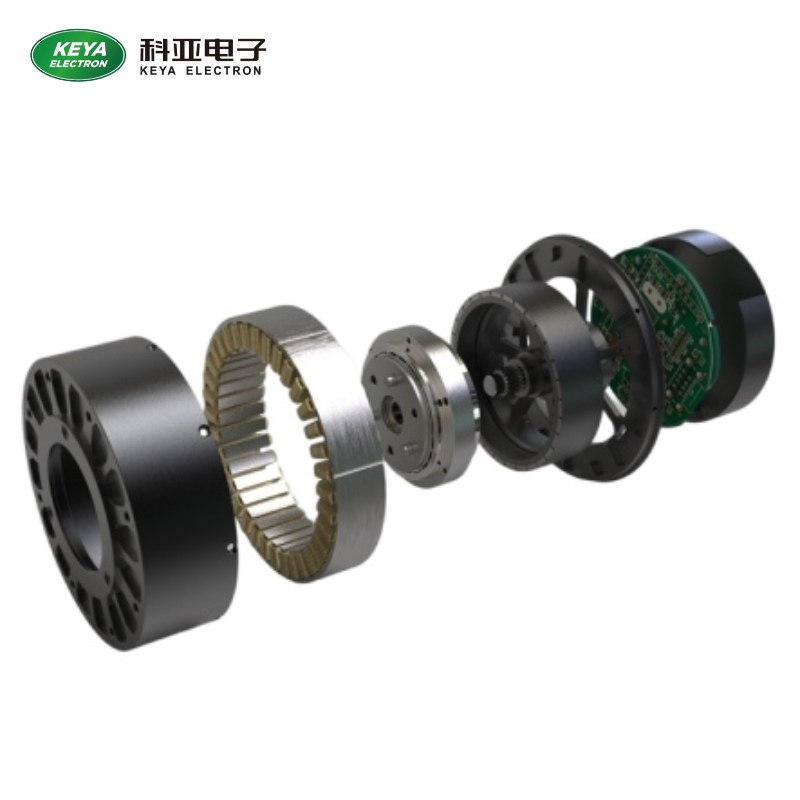
Appareil quatre en un (servomoteur intégré, pilote, codeur et réducteur) avec fonctionnement stable.
Basse vitesse, couple élevé, bonnes performances dynamiques et grande précision de contrôle.
De multiples fonctions de protection assurent un fonctionnement en douceur.
Prise en charge de la personnalisation.
Paramètres du produit :
Modèle |
KY96BL04035-15 |
KY160BL0405-06 |
Paramètres |
||
Tension nominale |
CC 48V |
|
Puissance nominale |
350 W |
530 W |
Courant nominal |
10.3A |
18,5 A |
Vitesse de sortie |
258 tr/min |
100 tr/min |
Couple nominal |
13N·m |
50N·m |
Courant max. instantané |
20A |
37A |
Couple max. instantané |
30N·m |
160N·m |
Nombre de pôles |
30 |
32 |
Partie Rétroaction |
Codeur absolu |
|
Méthode de contrôle |
RS232 / CAN2.0 / CANopen |
|
Rapport de réduction |
1:6 |
|
Mode de fonctionnement |
Mode vitesse, mode couple, mode position |
|
Poids |
0,85 kg |
2,95 kg |
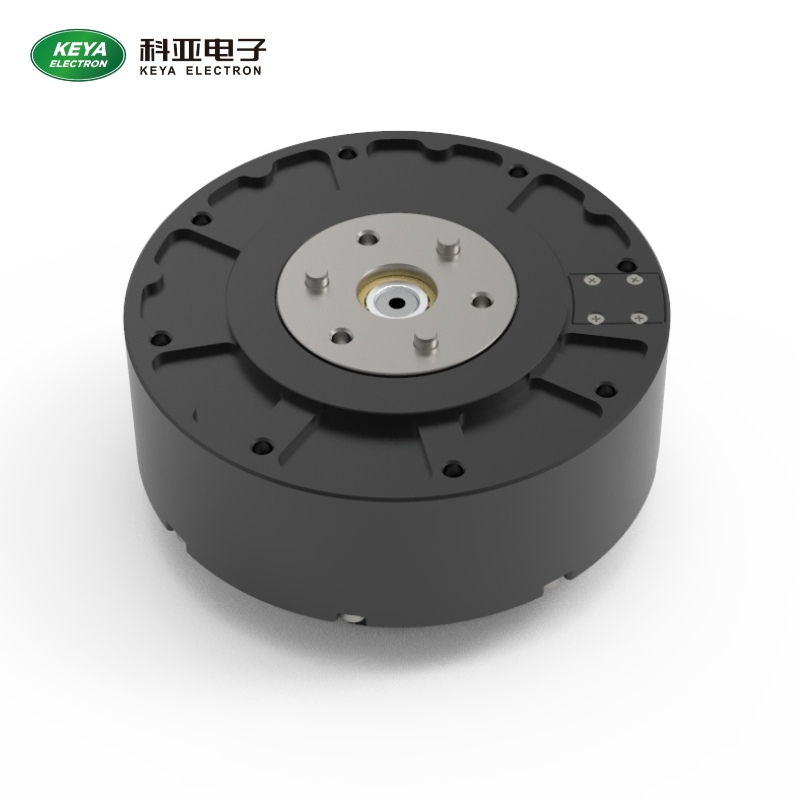
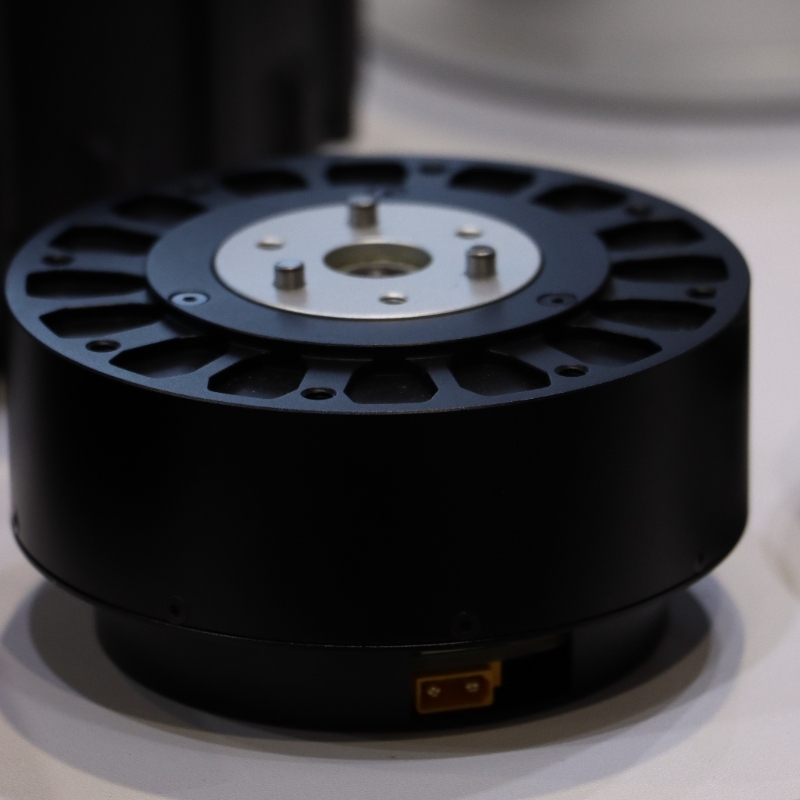
Dessin du produit :